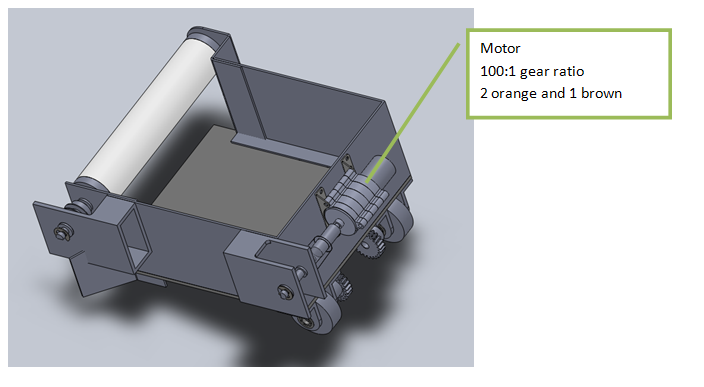
Our team is now in full fabrication mode. We have finished our front roller axle, 2 of the front brackets, the baseplate, and 2 of the end caps. In addition, we have started work on the hopper walls, other end caps, and roller. The plan is to make the other brackets and get the pulley parts in for the MCM review on Tuesday, so we can have it working by Thanksgiving.
Also on the table are the brackets for the rear drivetrain and wheel assembly, which will mostly complete our car. After that, we can focus on driving practice and making the telescoping arm module. We are definitely feeling the time constraints, but since our designs are all near ready to be manufactured and assembled, we eagerly await the competition.
Oh, and a minor snafu during our hopper wall construction. We ended up having to re-bend the flaps, so here is a picture of John doing some mistake-fixing on our piece :)





















{kind=link}